Nach erfolgreicher Datenaufnahme kann die Datenauswertung der Punktwolke mit dem CADdy-Workflow im Plugin “CADdy V for BricsCAD“ erfolgen.
Mit dem Lidarsensor des iPhone aufgenommene Punktwolken können mit bekannten Dateiformaten exportiert werden. Diese Formate (wie z.B. PLY, LAS, OBJ) sind auch BricsCAD und dem CADdy-V-Plugin bekannt und mit wenigen Klicks einlesbar.
Die BricsCAD-V21 bordeigene Funktion “Einfügen -> Punktwolke anhängen“ wird genutzt, um die Daten beispielsweise im LAS-Format zu visualisieren. Hierbei wird die Punktwolke mit ihren Originalkoordinaten in eine DWG-Zeichnung eingebettet. Das sieht dann so aus:
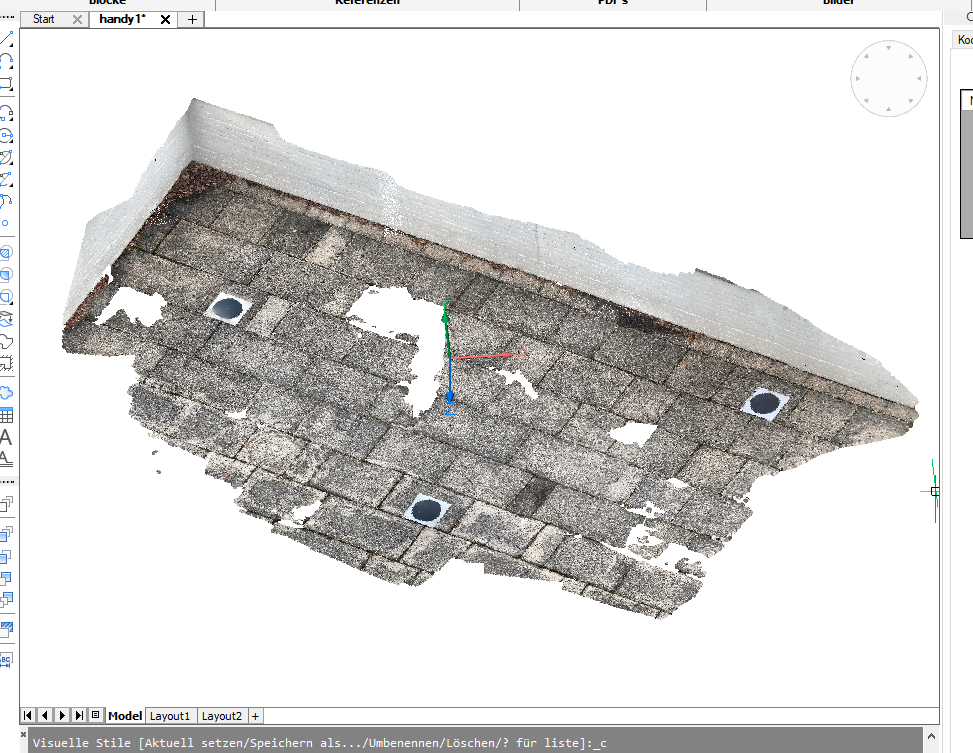
(Beispieldaten aufgenommen mit dem iPhone 12pro auf Büro-Terrasse Schatzbogen, München)
Diese Daten sind allerdings noch nicht georeferenziert und hier kommt nun Transformations-Funktionalität aus dem CADdy-V-Plugin ins Spiel.
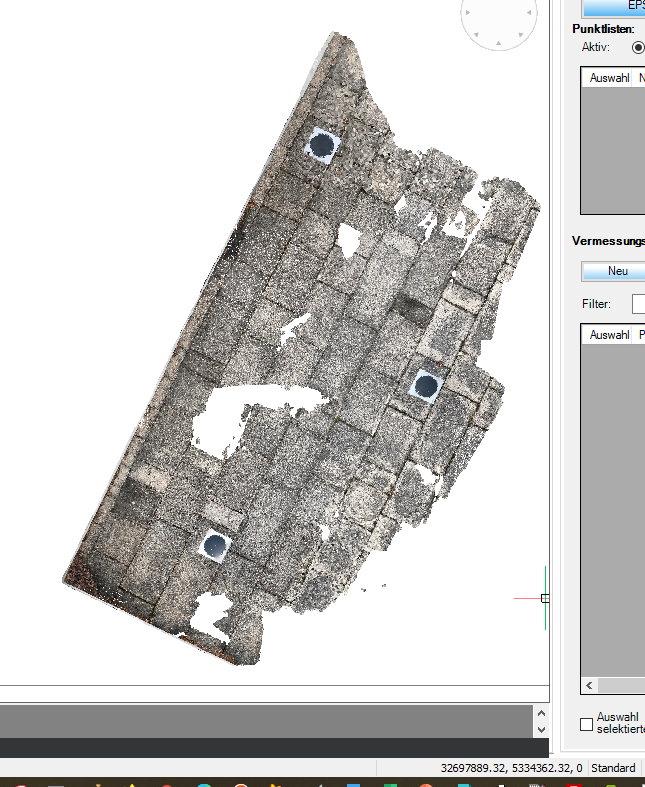
Im Beispiel sieht man gut 3 Passpunkte, die mit GPS schnell zentimetergenau aufgenommen werden können. Um sich die zu den Passpunkten passenden lokalen Koordinaten zu ermitteln, können die Punkte in der DWG digitalisiert werden, hierzu bietet BricsCAD einen komfortablen 3D-Fang an einzelnen Punktwolken-Punkten. Gespeichert werden die 3D-Vermessungspunkte dann direkt in der CADdy-Koordinatenverwaltung.
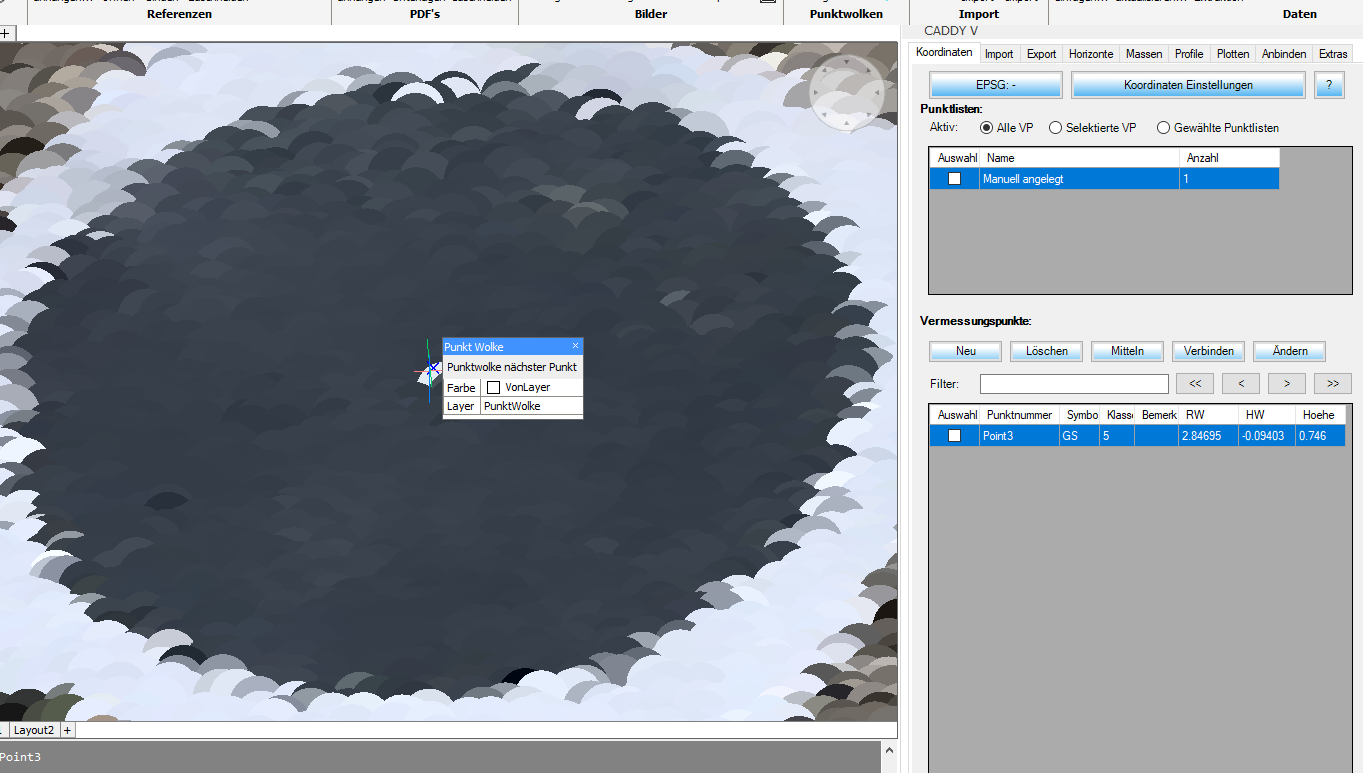
(Digitalisieren in der Punktwolke/3D-Punktfang mit blauem Kreuzmarker)
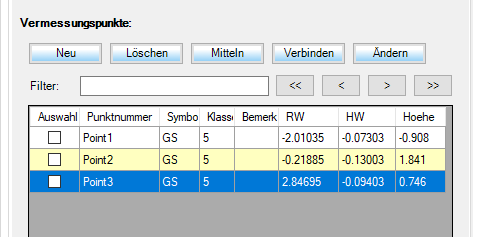
(komplett aufgenommene lokale Passpunktdaten)
Die Weltkoordinaten der 3 Passpunkte (mit identischen Punktnummern) hält man in einer ASCII-Koordinatendatei vor, wie z.B. im CADdy-KOR-Format:
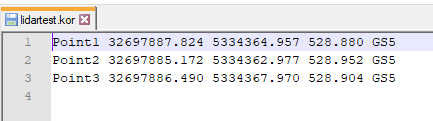
(Welt-Passpunktdaten im KOR-Format)
Die CADdy-V-Transformationsbibliothek bietet auch eine 7-Parameter-Helmert-Transformation, die nach unseren Vorbereitungen nun mit wenigen Klicks aus der lokalen Punktwolke Weltkoordinaten erzeugt.
(Benutzeroberfläche zur 7-Parameter-Transformation)
Nach Berechnung der Helmert-Transformationsparameter kann die Transformation direkt auf die ursprünglich vom iPhone erzeugte Punktwolken-Datei angewandt werden (Button “Externe Datei transformieren“) und diese wieder in eine DWG eingehängt werden, diesmal aber korrekt georeferenziert.
(georeferenzierte Punktwolke in UTM32-Koordinaten)



